보스턴 다이내믹스는 지난 4월 기존 이족보행 로봇 아틀라스의 2세대 모델을 처음 공개한 바 있다. 당시 공개된 짧은 영상에서는 로봇이 바닥에 누워있다가 관절을 비틀어 일어나고 몸통을 360도로 회전하며 걸어가는 모습이 담겼었다.
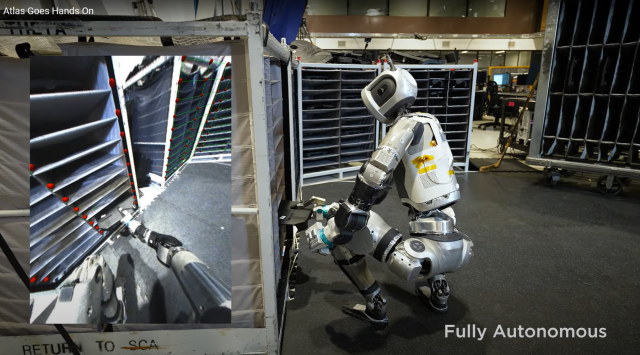
6개월여 만에 추가로 공개된 영상에서 신형 아틀라스는 공장에서 실제 사람처럼 일하는 모습을 연출하며 다양한 활용 가능성에 대한 청사진을 제시하고 있다. 영상에서 아틀라스는 엔진커버 부품을 이동식 보관함으로 옮기는 역할을 수행한다. 아틀라스는 머신 러닝 비전 모델을 활용해 부품의 위치와 종류를 인식하고 정확한 파지점을 판단해 물체를 집어 들어 이동식 보관함의 각 부품별 수납 공간에 꼽아 넣는다.
보스턴 다이내믹스 측은 수행 과정에서 원격 조작은 없으며 모든 동작은 로봇의 인지-판단-제어 과정을 통해 자율적으로 생성된다는 점을 강조했다. 동작 실패 상황까지도 대응하는 점도 관전 포인트다. 영상에서 아틀라스는 작업을 수행하다가 부품이 수납공간에 걸리는 실수를 하지만 곧바로 정자세를 취하고 다시 정상 작업하는 모습을 보여준다.
또 다른 영상에서는 보스턴 다이내믹스가 핼러윈 데이를 맞이해 핫도그 모양의 복장을 한 아틀라스가 같은 작업을 수행하는 모습이 담겼다. 이 영상에서는 아틀라스가 작업을 하는 도중 보스턴 다이내믹스 관계자가 이동식 보관함을 몰래 옮긴다. 하지만 아틀라스는 당황하지 않고 제 위치를 찾아 엔진 커버를 꼽아 넣는 등 우수한 대응 능력을 보여준다.
업계 관계자는 "이번 영상은 아틀라스가 인간의 개입을 최소화한 상태에서 자율적인 작업 능력을 증명했다는 점에서 의미가 있다"며 "특히 진보된 기술력을 바탕으로 생산 현장 투입 시점도 빠르게 앞당길 수 있을 것으로 보인다"고 말했다.

권가림 기자hidden@ajunews.com
기자의 다른기사
©'5개국어 글로벌 경제신문' 아주경제. 무단전재·재배포 금지


![[르포] 중력 6배에 짓눌려 기절 직전…전투기 조종사 비행환경 적응훈련(영상)](https://image.ajunews.com/content/image/2024/02/29/20240229181518601151_258_161.jpg)



